You're reading the documentation for an older, but still supported version
(GL013301).
For information on the latest version, please have a look at GL013303.
For information on the latest version, please have a look at GL013303.
3.1 Common
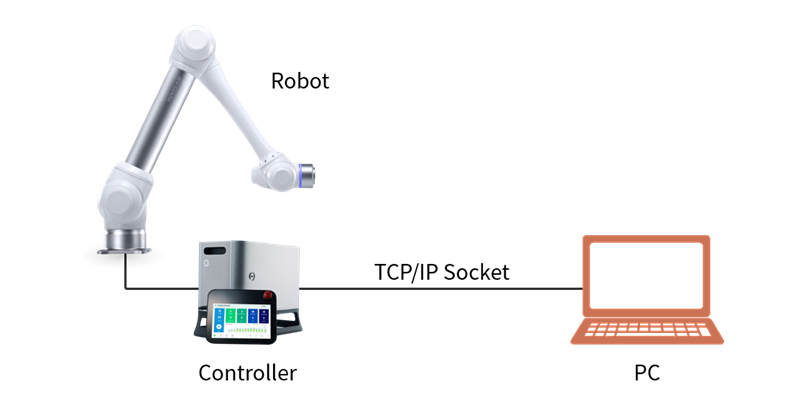
Common Mode provides the fundamental system-level capabilities required regardless of whether the robot is in Manual or Auto mode. General-purpose functions and shared APIs accessible across all operation modes.
Source by DoosanRobotics Training/OnlineCourses
These functions include system connection, mode/state monitoring, program execution utilities, motion execution interfaces, robot kinematics, I/O control, tool/TCP configuration, safety state monitoring, and various controller-level services.
- 3.1.1 Connection
- 3.1.2 Mode/State
- 3.1.3 Monitoring/Callbacks
- 3.1.4 Program/DRL_Execution
- 3.1.5 Motion execution
- 3.1.6 Position
- 3.1.7 Kinematics/Math
- 3.1.8 Velocity
- 3.1.9 Force/Compliance
- 3.1.10 Tool
- 3.1.11 Tcp
- 3.1.12 Payload
- 3.1.13 Coordinate
- 3.1.14 I/O
- 3.1.15 Modbus
- 3.1.16 Serial(Flange)
- 3.1.17 TP
- 3.1.18 Report alarm
- 3.1.19 LED
- 3.1.20 Safety(Configuration parameter)
- 3.1.21 Safety(State/Mode)
- 3.1.22 Servo Power