For information on the latest version, please have a look at GL013303.
1.2.1 API Layer Architecture
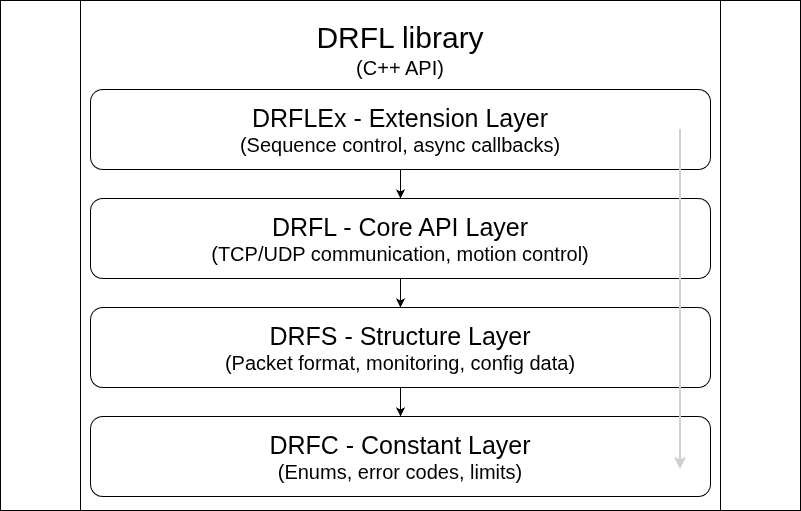
The API Layer of the Doosan Robotics Framework Library (DRFL) is composed of four hierarchical header files: DRFC, DRFS, DRFL, and DRFLEx.
These headers define all constants, data structures, core APIs, and extended functionalities required for robot control and communication between the user application and the controller.
DRFC.h
Constant Layer
Defines all global constants, enumerations, and macros used across the API. This includes motion types, robot states, I/O modes, and safety levels. It serves as the foundational definition file referenced by all higher layers.
DRFS.h
Structure Layer
Declares all data structures exchanged between the API and the robot controller.
It includes monitoring data (ROBOT_MONITORING_DATA_EX), configuration structures
such as CONFIG_TOOL and CONFIG_SAFETY_ZONE, as well as position and joint representations.
This file ensures consistent data formatting and interoperability across all robot models.
DRFL.h
Core API Layer
Provides the main interface functions exposed to users, including motion commands (movej(), movel()),
I/O operations (set_digital_output()), and system controls (start_robot(), manage_access_control()).
It references constants and structures defined in DRFC and DRFS to process requests and communicate with the robot controller.
DRFLEx.h
Extension Layer
Offers extended and high-level APIs built upon DRFL.
This layer supports advanced capabilities such as motion blending, asynchronous callbacks, and sequence automation,
enabling developers to create complex and user-friendly robotic applications.