For information on the latest version, please have a look at GL013303.
check_orientation_condition_rel
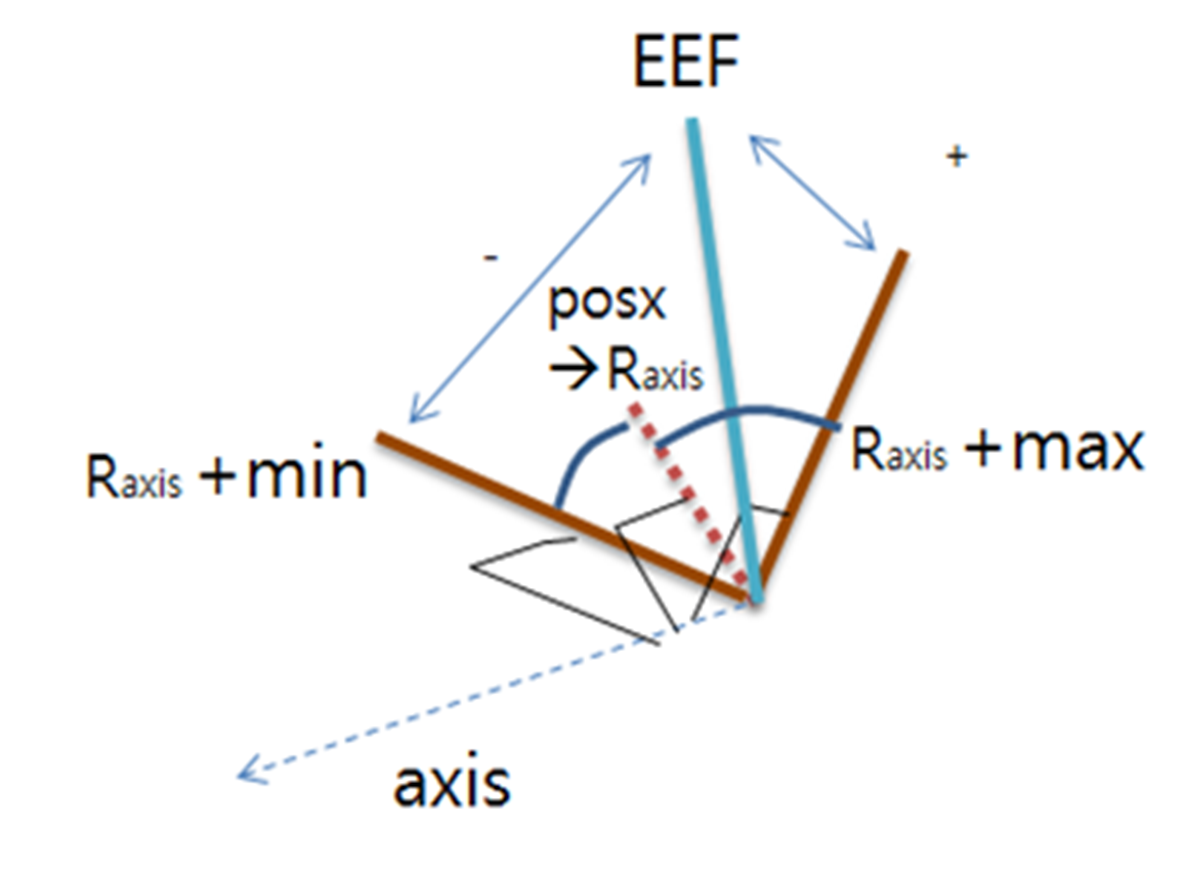
This function checks the relative rotational difference between the current tool orientation and a target orientation, along a specified axis, within a defined minimum and maximum angular range. It evaluates whether the angular deviation from the target orientation is within the specified thresholds, using the Angle/Axis representation for rotation.
Definition
DRFLEx.h within class CDRFLEx, public section (line 960)
bool check_orientation_condition(FORCE_AXIS eForceAxis,
float fTargetMin[NUM_TASK],
float fTargetMax[NUM_TASK],
float fTargetPos[NUM_TASK],
COORDINATE_SYSTEM eForceReference = COORDINATE_SYSTEM_TOOL) {
return _check_orientation_condition_rel(_rbtCtrl, eForceAxis, fTargetMin, fTargetMax, fTargetPos, eForceReference);
};
Parameter
Parameter Name |
Data Type |
Default Value |
Description |
|---|---|---|---|
eForceAxis |
Axis of rotation to evaluate (Rx, Ry, Rz). |
||
fTargetMin |
float[6] |
Minimum acceptable angular deviation (in degrees or radians depending on configuration). |
|
fTargetMax |
float[6] |
Maximum acceptable angular deviation. |
|
fTargetPos |
float[6] |
Target task position (pose reference) used for rotational comparison. |
|
eForceReference |
|
Coordinate reference for orientation comparison (TOOL or BASE). |
Return
Value |
Description |
|---|---|
1 |
The condition is True (orientation within the defined range). |
0 |
The condition is False (orientation outside the specified range). |
check_orientation_condition_rel
Example
#include "DRFLEx.h"
#include <cstdio>
using namespace DRAFramework;
int main() {
CDRFLEx drfl;
// Preconditions: Connected, servo ON, Manual (Teach) or Auto mode active
// Define reference orientation (Rx, Ry, Rz in degrees)
float posRef[6] = {400.f, 500.f, 600.f, 0.f, 180.f, 0.f};
// Check if rotation around Ry is within ±15° from the reference orientation in TOOL frame
bool cond = drfl.check_orientation_condition(FORCE_AXIS_Y, -15.f, 15.f, posRef, COORDINATE_SYSTEM_TOOL);
printf("Orientation condition result: %s\n", cond ? "TRUE" : "FALSE");
return 0;
}
In this example, the function checks whether the current rotation about the Ry axis is within ±15° of the reference pose orientation in the TOOL coordinate frame.
Tips
Use this function for relative orientation tracking or angular convergence monitoring in both Manual and Auto modes.
Particularly useful in tasks requiring screw alignment, peg-in-hole, or fine rotational adjustments.
Combine with position checks to ensure both location and orientation are within desired tolerances.