For information on the latest version, please have a look at GL013303.
app_weld_weave_cond_trapezoidal
Definition
DRFLEx.h within class CDRFLEx, public section (line 1002)
bool app_weld_weave_cond_trapezoidal(CONFIG_TRAPEZOID_WEAVING_SETTING pConfigtrapezoidweavingsetting)
{
return _app_weld_weave_cond_trapezoidal(_rbtCtrl, pConfigtrapezoidweavingsetting);
};
Features
This function sets the trapezoidal weaving conditions. These conditions are only valid within the welding section defined from weld activation (app_weld_enable_analog / app_weld_enable_digital) to deactivation (app_weld_disable_digital), and an error will occur if executed outside of this section.
Weaving conditions are defined in the weave coordinate system, where the direction of the weld path is the weave x-axis, and the direction of the vector product (cross-product) of the weave x-axis and the TCP-z direction is the weave y-axis.
Refer to the figure below for the coordinate system and weave setting parameters.
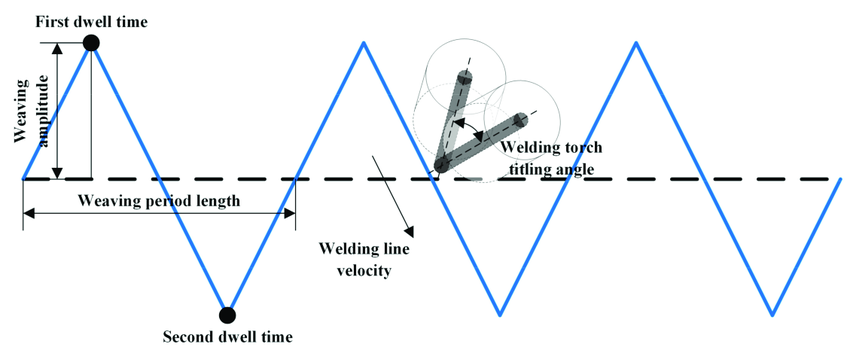
Source by ResearchGate — “Weaving parameters of weaving welding”
Weaving Coordinate System and Parameters
Only one weaving condition is allowed within a single welding section. During welding, you can adjust the offset or weaving width using app_weld_adj_welding_cond_analog / app_weld_set_weld_cond_digital command, or adjust the voltage/current/speed and offset using the welding condition popup on the teaching pendant.
However, adjusting weaving conditions from the pendant is only possible when the condition adjustment state is RESET, i.e., the condition was last set by app_weld_set_weld_cond_digital.
Arguments
Argument Name |
Data Type |
Default Value |
Description |
|---|---|---|---|
wv_offset |
float[2] |
[0, 0] |
[0] Weave coordinate y-axis offset (mm) |
wv_angle |
float |
0 |
Rotation angle of the weaving plane with respect to the weave x-axis (deg) |
wv_param |
list(float[10]) |
[0, 1.5, 0, -1.5, 0.3, 0.1, 0.3, 0.3, 0.1, 0.3] |
[0] Weaving point 1 - X (mm) |
Return
Value |
Description |
|---|---|
|
Error |
|
Success |
Example
CONFIG_TRAPEZOID_WEAVING_SETTING weaving_trap;
weaving_trap.fOffsetY = 0.0;
weaving_trap.fOffsetZ = 0.0;
weaving_trap.fAngle = 0.0;
weaving_trap.fParam[0] = 0.0; // Weaving point 1 - X
weaving_trap.fParam[1] = 1.5; // Weaving point 1 - Y
weaving_trap.fParam[2] = 0.0; // Weaving point 2 - X
weaving_trap.fParam[3] = -1.5; // Weaving point 2 - Y
weaving_trap.fParam[4] = 0.3; // 1→2 transition time
weaving_trap.fParam[5] = 0.1; // Accel/decel time
weaving_trap.fParam[6] = 0.3; // Point 1 dwell time
weaving_trap.fParam[7] = 0.3; // 2→1 transition time
weaving_trap.fParam[8] = 0.1; // Accel/decel time
weaving_trap.fParam[9] = 0.3; // Point 2 dwell time
Drfl.app_weld_weave_cond_trapezoidal(weaving_trap);
This example defines a trapezoidal weave path that oscillates between ±1.5 mm in the y-direction with a 0.3 s dwell and smooth acceleration, suitable for thin sheet welding.