For information on the latest version, please have a look at GL013303.
1.4 Realtime External Control
Real-time External Control is a UDP/IP-based communication api for users who want to directly control the robot arm from an external PC through the Doosan controller.
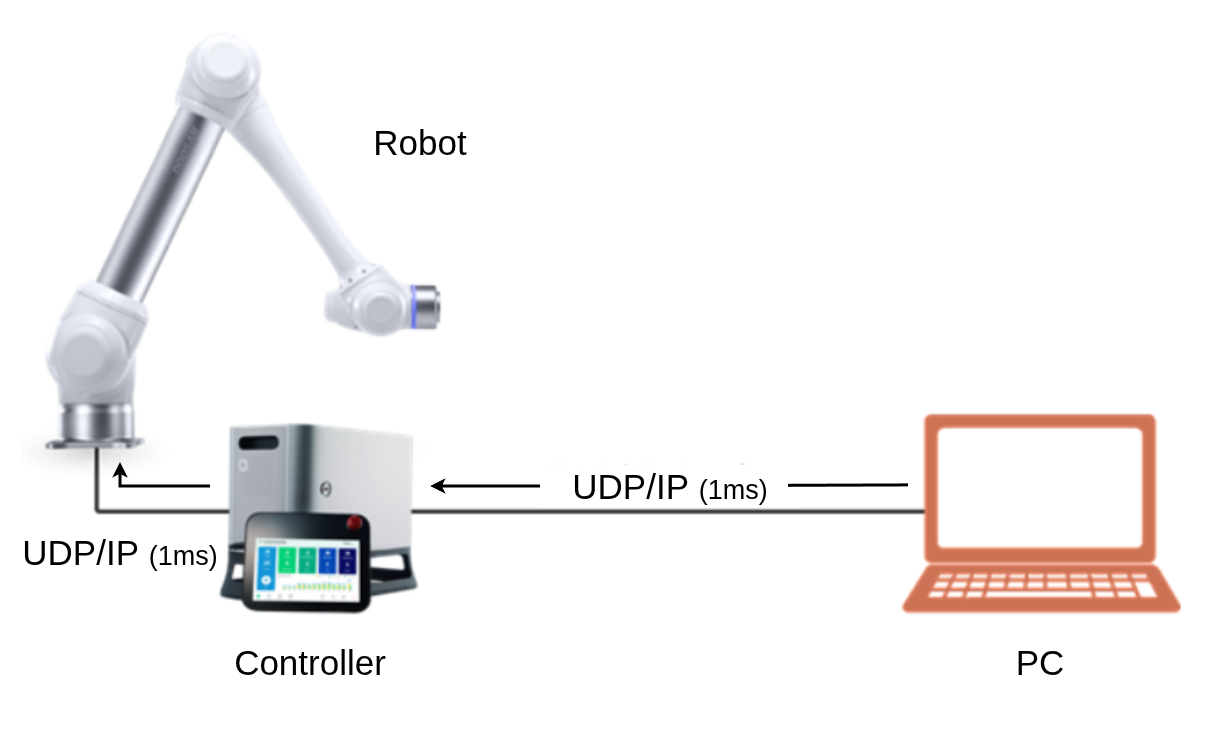
Realtime UDP Communication
It operates independently of the existing TCP/IP-based communication api, and sends and receives input data (external controller → robot controller) and output data (robot controller → external controller) required for real-time control up to 1 kHz at a set period, and separately you can send servo control commands (servoj_rt, servol_rt, speedj_rt, speedl_rt, torque_rt).
Note
While the RT channel supports high-speed communication up to 1 kHz, the standard TCP/IP API operates at a slower cycle: 20 kHz on earlier version of the DRCF, and 50 kHz on DRCF version 3.5 or later.