rt_topic Publish Tutorial
Overview
The rt_topic feature enables real-time publishing of selected robot data fields
through the read_data_rt service. This allows low-latency streaming of joint states,
torques, sensor readings, and various controller data for applications requiring
high-frequency monitoring or fast control loops.
The rt_topic system retrieves internal controller data using the
read_data_rt service and maps each selected data field to a user-defined string key.
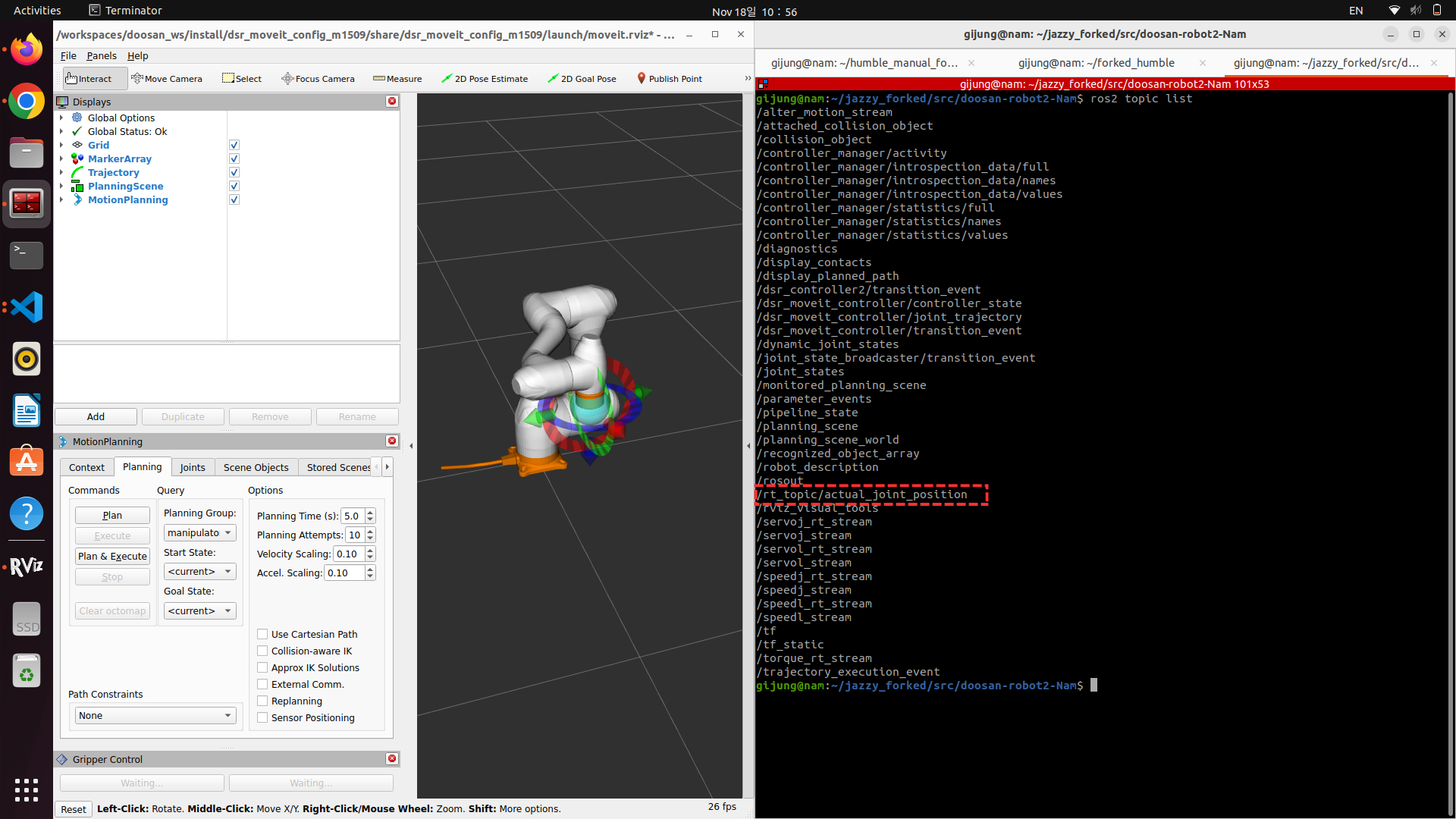
Each key becomes a dedicated ROS 2 topic under the namespace: /rt_topic/<key>
This mechanism is suitable for:
High-frequency robot state monitoring
External control loops requiring low latency
Real-time diagnostics and visualization
Logging or streaming raw sensor feedback
Warning
This feature is supported only in real mode. Values returned in virtual mode are not valid and should not be used.
Prerequisites
The feature is included in the doosan-robot2 Humble distribution.
Ensure that the package is correctly installed before continuing.
For installation instructions, refer to: Installation
Setup and Launch
1. Modify dsr_controller2.yaml Parameters
To enable RT topic publishing, configure the following parameters in:
dsr_controller2/config/dsr_controller2.yaml
Parameter descriptions:
use_rt_topic_pubEnables or disables RT topic publishing.rt_timer_msSets the publishing interval (ms).rt_topic_keysSpecifies the list of field names to publish. Each entry generates a topic under/rt_topic/<key>.
Example configuration:
dsr_controller2:
ros__parameters:
joints:
- joint_1
- joint_2
- joint_3
- joint_4
- joint_5
- joint_6
# rt_data topic configuration
use_rt_topic_pub: true
rt_timer_ms: 10 # Publish interval in ms
rt_topic_keys: # Field names for RT publishing
- actual_joint_position
2. Launch the Controller
The RT topic publisher is automatically started when the
dsr_controller2 node is launched.
Any launch file that initializes the controller—such as the Gazebo, MoveIt2,
or RViz demos—will activate the feature if configured in the YAML file.
Refer to: Basic Tutorials
rt_topic_keys
The following keys are valid entries for rt_topic_keys.
Each key corresponds to a data field available from the read_data_rt service.
Example usage:
use_rt_topic_pub: true
rt_timer_ms: 10
rt_topic_keys:
- actual_joint_position
- actual_flange_position
1. 6-element float array fields (size = 6)
actual_joint_position
actual_joint_position_abs
actual_joint_velocity
actual_joint_velocity_abs
actual_tcp_position
actual_tcp_velocity
actual_flange_position
actual_flange_velocity
actual_motor_torque
actual_joint_torque
raw_joint_torque
raw_force_torque
external_joint_torque
external_tcp_force
target_joint_position
target_joint_velocity
target_joint_acceleration
target_motor_torque
target_tcp_position
target_tcp_velocity
gravity_torque
joint_temperature
goal_joint_position
goal_tcp_position
2. 6×6 matrix fields (size = 36)
coriolis_matrix
mass_matrix
jacobian_matrix
3. 2-element fields (size = 2)
controller_analog_input_type
controller_analog_input
controller_analog_output_type
controller_analog_output
external_encoder_strobe_count
external_encoder_count
4. 4-element fields (size = 4)
flange_analog_input
5. Scalar fields
time_stamp
solution_space
singularity
operation_speed_rate
controller_digital_input
controller_digital_output
flange_digital_input
flange_digital_output.. image:: ../images/etc/rt_topic.png
:alt: Doosan robot rt_topic
:width: 800px
:align: center
robot_mode
robot_state
control_mode