Gazebo Simulation
This launch file starts the robot in the Gazebo simulator with optional RViz2.
Command
ros2 launch dsr_bringup2 dsr_bringup2_gazebo.launch.py [arguments]
Arguments
mode: Operation mode -real: Connect to a physical Doosan robot -virtual: Run in emulator/simulation modemodel: Robot model name (e.g.,m1013,a0509,p3020)host: IP address of robot controller or emulatorport: Port for DRCF emulator (default:12345)x, y: Initial spawn position in Gazebo
Examples
Real Mode (Physical Robot)
This will connect to the real robot enabling motion control for both the real and simulated robots.
ros2 launch dsr_bringup2 dsr_bringup2_gazebo.launch.py mode:=real host:=192.168.137.100 model:=m1013
Virtual Mode (Simulation)
ros2 launch dsr_bringup2 dsr_bringup2_gazebo.launch.py mode:=virtual host:=127.0.0.1 port:=12346 model:=m1013 x:=0 y:=0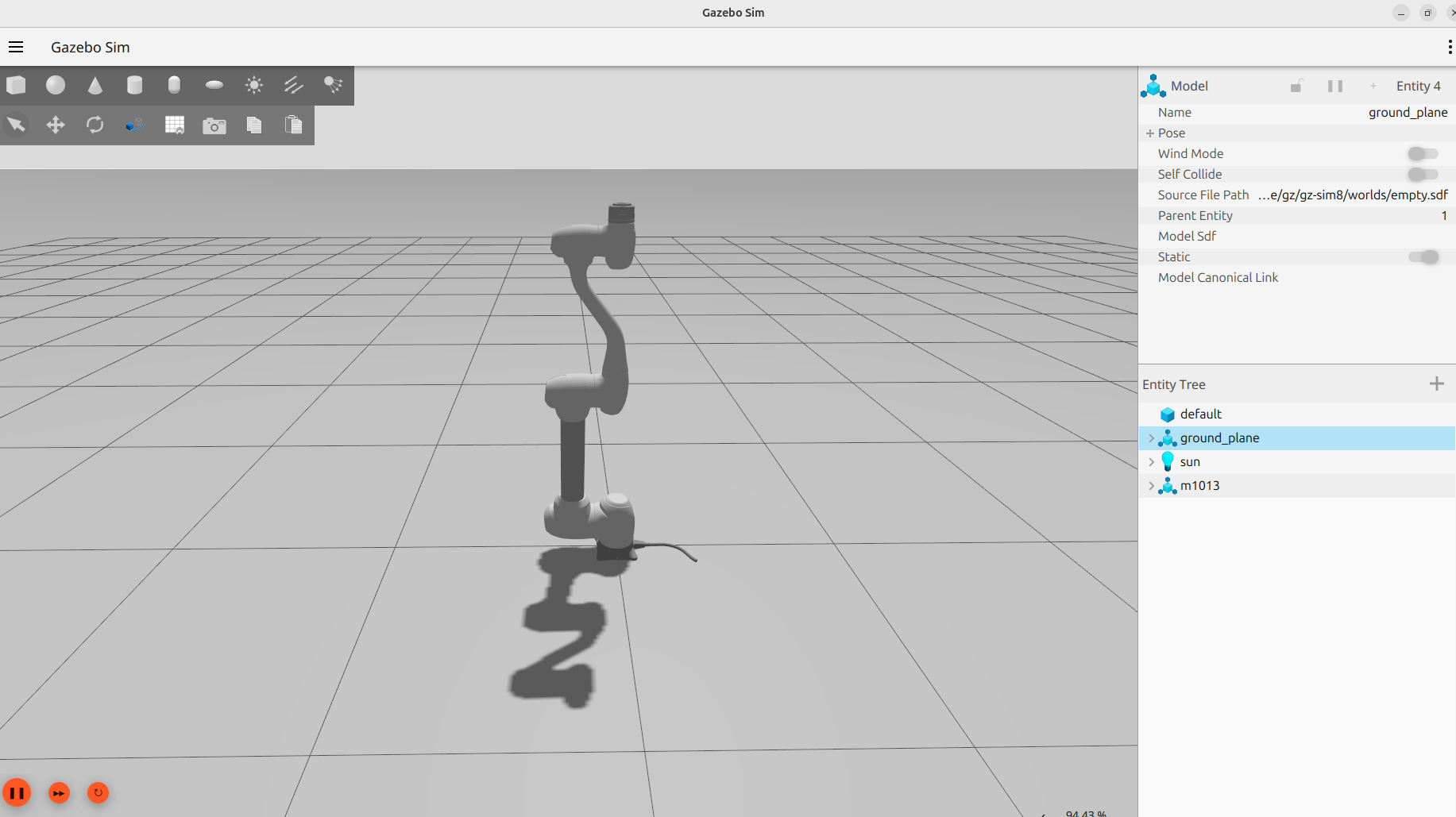
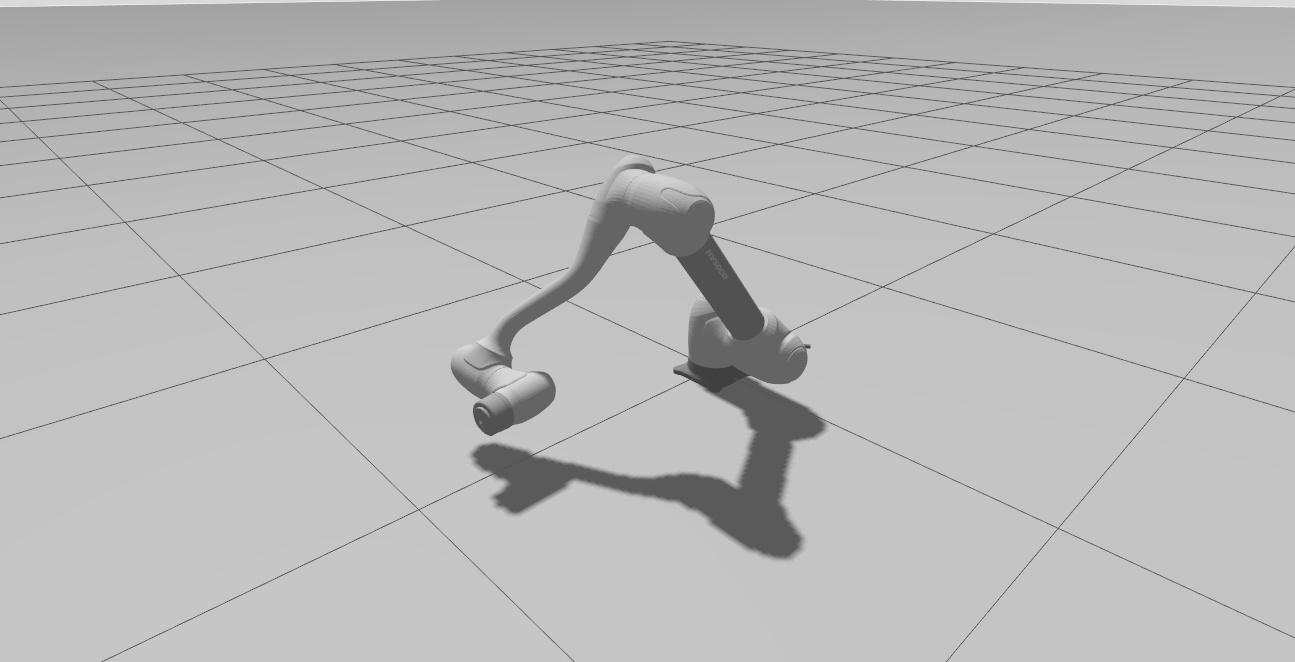
Test Motion Example
Once Gazebo is running, you can test the setup by executing a simple motion script.
Open a new terminal and run the following command:
ros2 run dsr_example dance
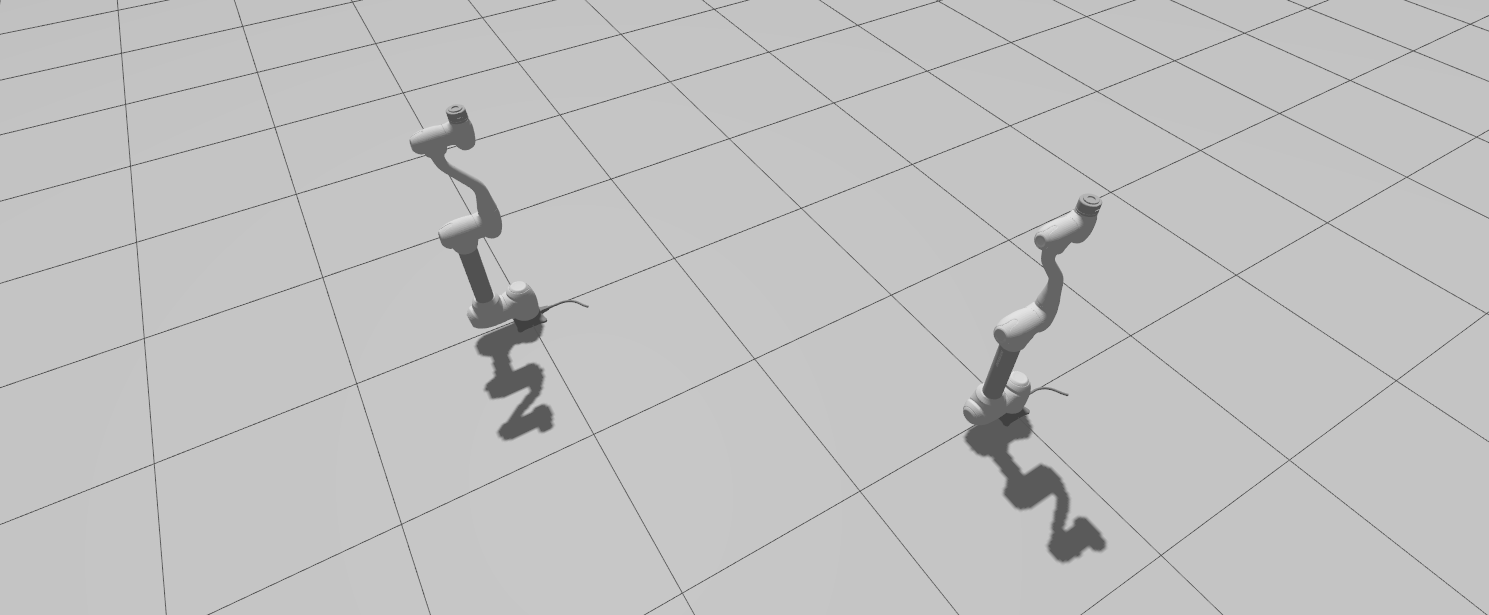
Multi-Arm Simulation
You can spawn multiple robots in Gazebo for multi-arm coordination and visualization.
Note
Each robot must have a unique name, port, and x/y location to prevent collision.
Multiple emulators will increase CPU usage and may impact performance.
Step 1. Launch First Robot
ros2 launch dsr_bringup2 dsr_bringup2_gazebo.launch.py mode:=virtual host:=127.0.0.1 port:=12345 name:=dsr01 model:=m1013 x:=0 y:=0 color:=white
Step 2. Spawn Second Robot
ros2 launch dsr_bringup2 dsr_bringup2_spawn_on_gazebo.launch.py mode:=virtual host:=127.0.0.1 port:=12347 name:=dsr02 x:=2 y:=2