Launch with MuJoCo
Overview
This package enables controlling Doosan robots in the MuJoCo physics simulator using ROS 2. You can simulate various robot models in custom environments and interact with them using ROS 2 interfaces.
Supported Models:
H-SERIES: h2515 (blue), h2017 (blue)
M-SERIES: m1013 (white), m0609 (white), m1509 (white), m0617 (white)
A-SERIES: a0509 (blue), a0912 (blue)
E-SERIES: e0509 (white)
Prerequisites
Install MuJoCo
Download the appropriate version from the official releases and unzip it. For more details, refer to the MuJoCo documentation. Download the zip or tar.gz file with the name containing (linux-x86_64) and extract it to your designated location.”
Set Environment Variable
Add the
MUJOCO_DIRenvironment variable to your~/.bashrcfile. Make sure to replace the path and version with your specific installation details.export MUJOCO_DIR=/PATH/TO/MUJOCO/mujoco-3.x.x export PATH=$MUJOCO_DIR/bin:$PATH export LD_LIBRARY_PATH=$MUJOCO_DIR/lib:$LD_LIBRARY_PATH
Install MuJoCo ROS 2 Control Package
This package provides the ROS 2 interface for MuJoCo.
# Install dependencies sudo apt update && sudo apt install libglfw3-dev # Clone and build the package from a specific commit cd ~/ros2_ws/src git clone https://github.com/moveit/mujoco_ros2_control.git cd ~/ros2_ws colcon build source install/setup.bash
Command
ros2 launch dsr_bringup2 dsr_bringup2_mujoco.launch.py [arguments]
Arguments
model: Name of the Doosan robot model. (Default:m1013)gui: Launch RViz2 GUI. (true/false, Default:true)gripper: Gripper model to attach. (Default:2f85)scene_path: Path to a custom MuJoCo XML scene file. (Default:none)
Example
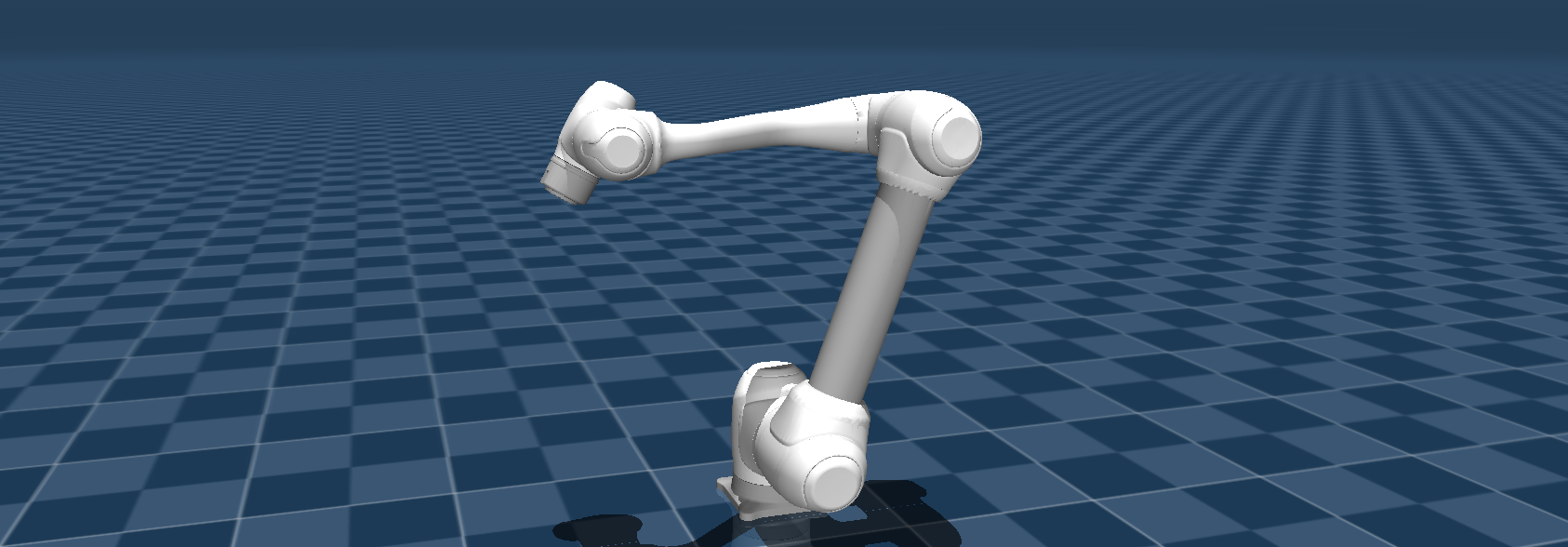
Launch a Robot in a Blank Scene
This command launches the m1013 robot in an empty MuJoCo environment. (every settings in default)
ros2 launch dsr_bringup2 dsr_bringup2_mujoco.launch.py
In a new terminal you can run command to move the robot.
ros2 run dsr_example dance
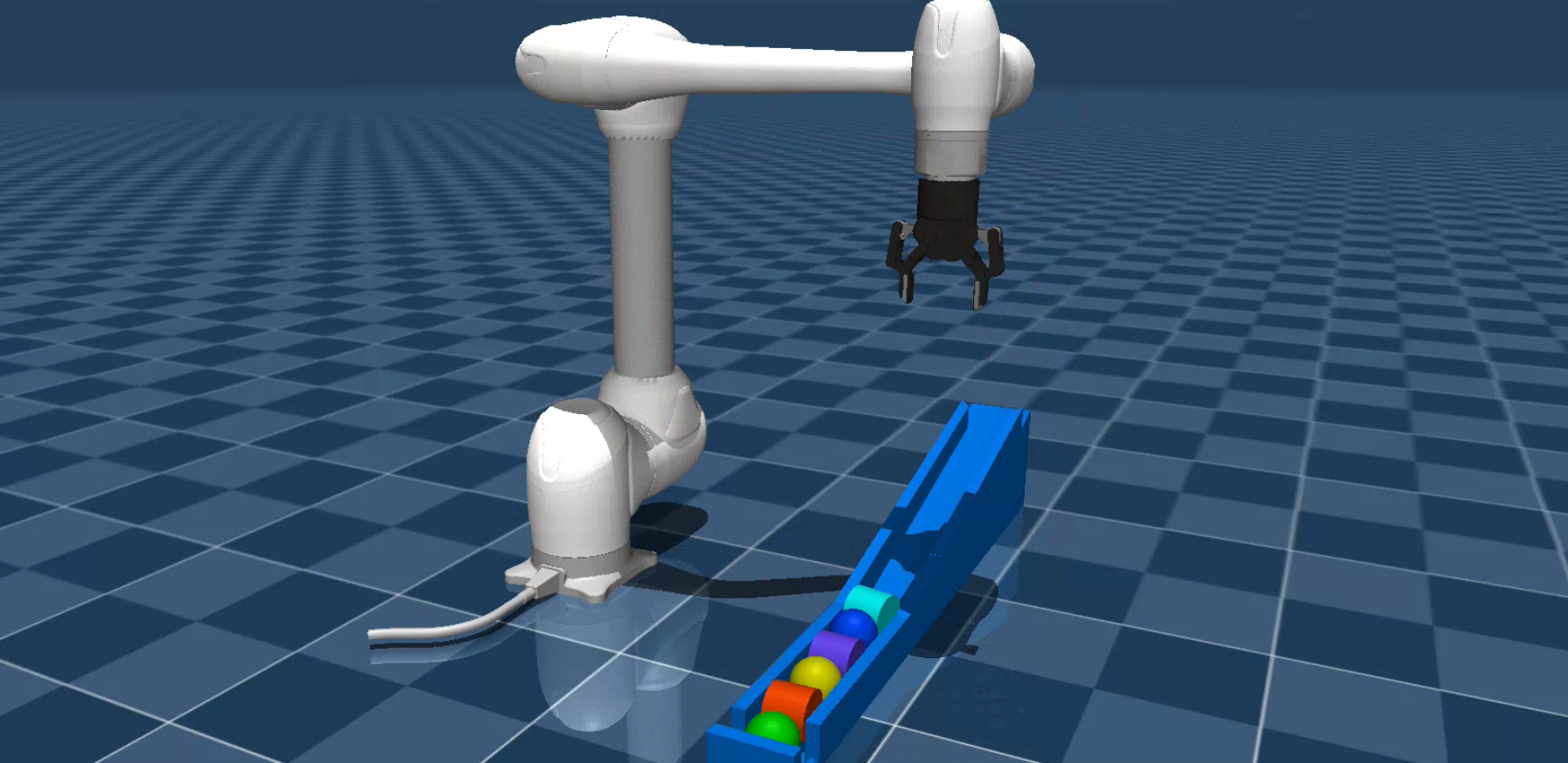
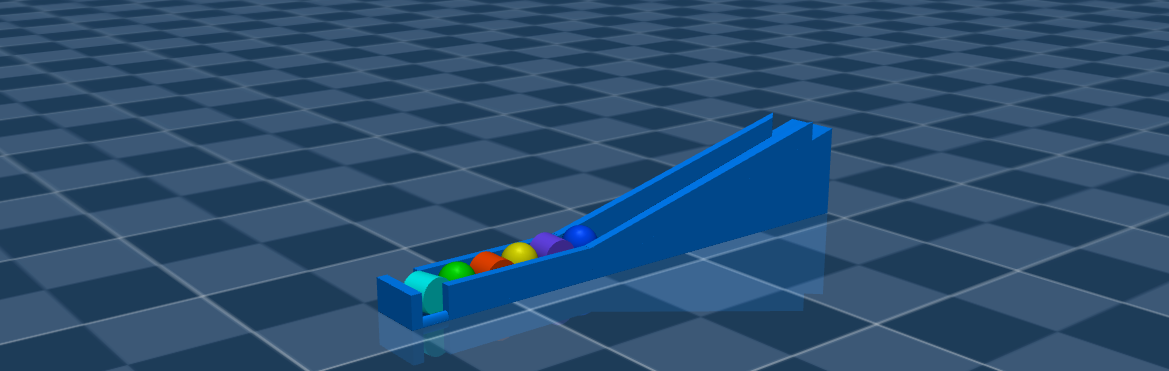
Pick & Place Demo
This example launches the m1013 robot with a gripper in a pre-configured scene and runs a pick-and-place demonstration.
Launch m1013 with gripper in the demo scene:
ros2 launch dsr_bringup2 dsr_bringup2_mujoco.launch.py model:=m1013 gripper:=2f85 scene_path:=demo/slope_demo_scene.xml
In a new terminal, run the Pick & Place script:
ros2 run dsr_example slope_demo
Customizing the MuJoCo Environment
You can create custom simulation environments by editing or creating new MuJoCo scene (.xml) files.
Scene files are located in dsr_description2/mujoco_models/.
In these files, you can add or modify elements such as floor, lighting, and objects.
Key MuJoCo XML tags for customization include:
<Compiler>: Defines global simulation settings such as calculation methods. The
meshdirattribute is critical for locating model asset files.
<compiler angle="radian" meshdir="../" />
Note
For the robot model to load successfully, meshdir should point to mujoco_models directory properly.
<Option>: Fine-tunes physics properties like contact models and integrators, which is important for stable grasping.
<option cone="elliptic" impratio="200" integrator="implicitfast"/>
For detailed guidance on creating scenes, refer to the official MuJoCo XML documentation.
Tip
Use MuJoCo’s native simulator to quickly test and debug your scene files: ./simulate <your_scene.xml>. The simulate executable is in the bin folder of your MuJoCo installation.
Gripper Operation
Unlike the main DSR manipulators, grippers should use individual ROS 2 controllers.
2F85 Gripper Example
The 2F85 gripper uses the forward_command_controller/ForwardCommandController, which is a standard ROS 2 controller.
This controller manages the left_driver_joint of the gripper by /{ns}/mj/left_knuckle_position_controller/commands topics.
You can find an example of its usage in the dsr_example2/dsr_example/dsr_example/demo/slope_demo.py script.

To control the gripper from the terminal, publish a Float64MultiArray message to the /dsr01/mj/left_knuckle_position_controller/commands topic.
Open Gripper:
ros2 topic pub /dsr01/mj/left_knuckle_position_controller/commands std_msgs/msg/Float64MultiArray "{data: [0.0]}"
Close Gripper:
ros2 topic pub /dsr01/mj/left_knuckle_position_controller/commands std_msgs/msg/Float64MultiArray "{data: [0.8]}"