Overview
Purpose
This package provides control functionality for all Doosan robot models in the ROS 2 Humble environment.
Features
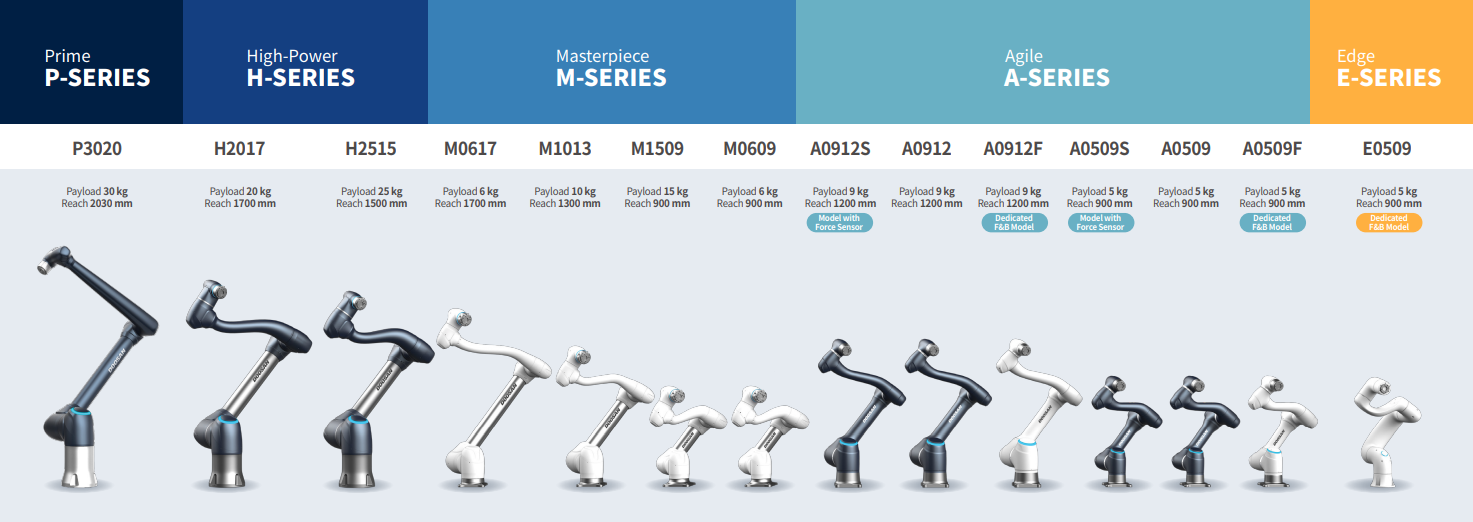
Supports all Doosan robot models (A/M/H/E/P series)
Virtual emulator mode for development and testing without hardware
Integrated DRFL (Doosan Robot Framework Library) for direct command-level access
Optional real-time control interface for low-latency communication
Pre-configured launch files for RViz2, Gazebo, and MoveIt 2
MoveIt 2 integration for motion planning and manipulation tasks
Gazebo Harmonic simulation support for dynamic testing and validation
RViz2-based robot state visualization and planning preview
Includes sample applications and demo scripts for quick setup and usage
License
All packages are distributed under Apache License 2.0. See the LICENSE file for details.