Motion Services
Trans
Translates/rotates the input pose (
pos) bydeltain therefcoordinate, then returns the result expressed inref_out.If
refis DR_TOOL, the result is returned in the input pose’s frame andref_outis ignored.
Request:
float64[6] pos # task pos (posx)
float64[6] delta # delta (posx)
int8 ref #= 0 # DR_BASE(0), DR_TOOL(1), DR_WORLD(2)
# <DR_WORLD is only available in M2.40 or later>
int8 ref_out #= 0 # DR_BASE(0), DR_WORLD(2)
# <ref_out is only available in M2.40 or later>
Response:
float64[6] trans_pos # transformed pos (posx)
bool success
Note
The
refargument valueDR_WORLDis available in M2.40 or later.The
ref_outargument is available in M2.40 or later.
Fkin
Converts joint angles (float64[6]) to TCP pose (task space) in the specified reference frame.
Request:
float64[6] pos # joint pos (posj)
int8 ref #= 0 # DR_BASE(0), DR_WORLD(2)
# <ref is only available in M2.40 or later>
Response:
float64[6] conv_posx # task pos (posx)
bool success
Note
The ref argument is available in M2.40 or later.
Ikin
Returns the joint position for the given task pose and solution space (0–7).
Request:
float64[6] pos # task pos (posx)
int8 sol_space # solution space : 0 ~ 7
int8 ref #= 0 # DR_BASE(0), DR_WORLD(2)
# <ref is only available in M2.40 or later>
Response:
float64[6] conv_posj # joint pos (posj)
bool success
Note
The ref argument is available in M2.40 or later.
SetRefCoord
Sets the system-wide reference coordinate.
Request:
int8 coord # DR_BASE(0), DR_TOOL(1), DR_WORLD(2), user coord(101~200)
# <DR_WORLD is only available in M2.40 or later>
Response:
bool success
Note
DR_WORLD is available in M2.40 or later.
MoveJoint
Moves from the current joint position to the target joint position (pos).
Request:
float64[6] pos # target joint angles [deg]
float64 vel # velocity [deg/s]
float64 acc # acceleration [deg/s^2]
float64 time #= 0.0 # time [s]
float64 radius #= 0.0 # blending radius [mm]
int8 mode #= 0 # MOVE_MODE_ABSOLUTE=0, MOVE_MODE_RELATIVE=1
int8 blend_type #= 0 # BLENDING_SPEED_TYPE_DUPLICATE=0, BLENDING_SPEED_TYPE_OVERRIDE=1
int8 sync_type #= 0 # SYNC=0, ASYNC=1
Response:
bool success
Note
If time is specified, the motion is executed time-based and vel/acc are ignored.
MoveJointx
Moves to a task-space target (pos in posx form) using joint-space motion.
Path linearity is not guaranteed. One of 8 robot configurations (solution space) must be specified.
Request:
float64[6] pos # target task pose (posx)
float64 vel # velocity [deg/s]
float64 acc # acceleration [deg/s^2]
float64 time #= 0.0 # time [s]
float64 radius #= 0.0 # blending radius [mm]
int8 ref # DR_BASE(0), DR_TOOL(1), DR_WORLD(2)
# <DR_WORLD is only available in M2.40 or later>
int8 mode #= 0 # MOVE_MODE_ABSOLUTE=0, MOVE_MODE_RELATIVE=1
int8 blend_type #= 0 # BLENDING_SPEED_TYPE_DUPLICATE=0, BLENDING_SPEED_TYPE_OVERRIDE=1
int8 sol # solution space : 0 ~ 7
int8 sync_type #= 0 # SYNC=0, ASYNC=1
Response:
bool success
Note
If
timeis specified, the motion is executed time-based andvel/accare ignored.Using blending in the preceding motion with relative mode (
mode = MOVE_MODE_RELATIVE) causes an error; prefer blending withMoveJointorMoveLine.The
refargument valueMOVE_REFERENCE_WORLDis available in M2.40 or later.See
MoveJointandMoveLinefor details on blending,radius, and velocity/acceleration behavior.
MoveLine
Moves along a straight line in task space to the target pose (pos).
Request:
float64[6] pos # target task pose (posx)
float64[2] vel # [linear mm/s, angular deg/s]
float64[2] acc # [linear mm/s^2, angular deg/s^2]
float64 time #= 0.0 # time [s]
float64 radius #= 0.0 # blending radius [mm]
int8 ref # DR_BASE(0), DR_TOOL(1), DR_WORLD(2)
# <DR_WORLD is only available in M2.40 or later>
int8 mode #= 0 # MOVE_MODE_ABSOLUTE=0, MOVE_MODE_RELATIVE=1
int8 blend_type #= 0 # BLENDING_SPEED_TYPE_DUPLICATE=0, BLENDING_SPEED_TYPE_OVERRIDE=1
int8 sync_type #= 0 # SYNC=0, ASYNC=1
Response:
bool success
Note
If
velis provided (e.g.,vel=[30, 0]), it specifies the linear velocity; the angular velocity is set proportionally to this linear velocity.If
accis provided (e.g.,acc=[60, 0]), it specifies the linear acceleration; the angular acceleration is set proportionally to this linear acceleration.If
timeis specified, the motion is executed time-based andvel/accare ignored.The
refargument valueMOVE_REFERENCE_WORLDis available in M2.40 or later.
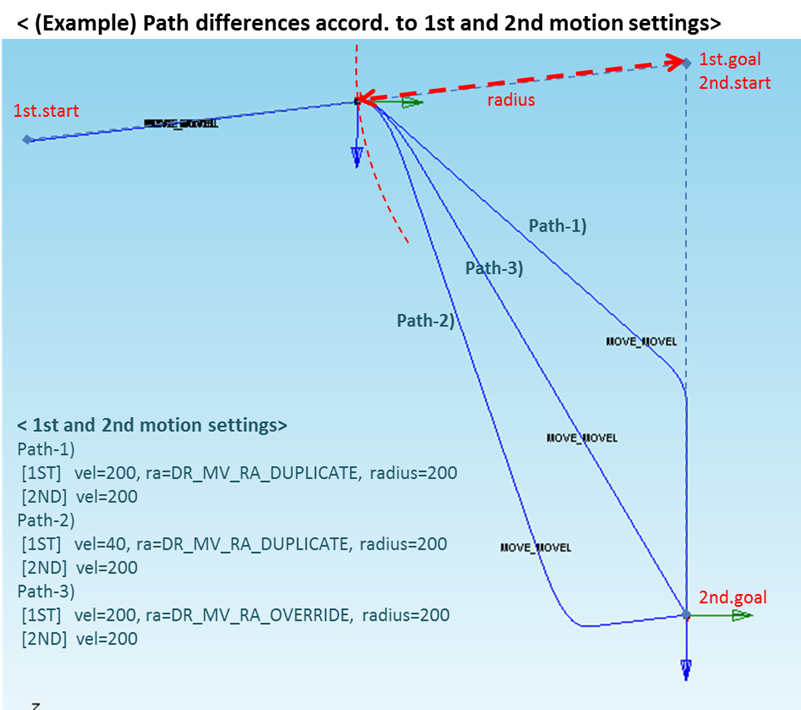
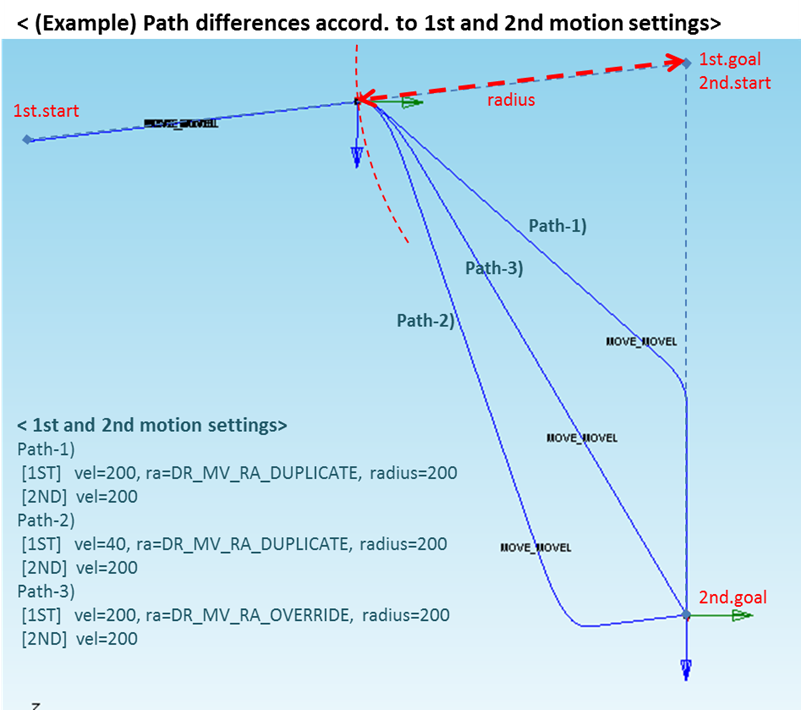
Caution
When blending with blend_type = BLENDING_SPEED_TYPE_DUPLICATE and radius > 0, the preceding motion may terminate when the following motion finishes if the preceding motion’s remaining time (based on remaining distance, velocity, and acceleration) exceeds the following motion’s time. Refer to the image for details.
MoveCircle
Moves along an arc to target pos2 via waypoint pos1, or rotates by a specified angle from the current pose (task space).
Request:
std_msgs/Float64MultiArray[] pos # two poses: pos1, pos2 (each 6)
float64[2] vel # [linear mm/s, angular deg/s]
float64[2] acc # [linear mm/s^2, angular deg/s^2]
float64 time #= 0.0 # time [s]
float64 radius #= 0.0 # blending radius [mm]
int8 ref # DR_BASE(0), DR_TOOL(1), DR_WORLD(2)
# <DR_WORLD is only available in M2.40 or later>
int8 mode #= 0 # MOVE_MODE_ABSOLUTE=0, MOVE_MODE_RELATIVE=1
float64 angle1 #= 0.0 # [deg]
float64 angle2 #= 0.0 # [deg]
int8 blend_type #= 0 # BLENDING_SPEED_TYPE_DUPLICATE=0, BLENDING_SPEED_TYPE_OVERRIDE=1
int8 sync_type #= 0 # SYNC=0, ASYNC=1
Response:
bool success
Note
If
velis provided (e.g.,vel=[30, 0]), it specifies the linear velocity; the angular velocity is set proportionally to this linear velocity.If
accis provided (e.g.,acc=[60, 0]), it specifies the linear acceleration; the angular acceleration is set proportionally to this linear acceleration.If
timeis specified, the motion is executed time-based andvel/accare ignored.The
refargument valueMOVE_REFERENCE_WORLDis available in M2.40 or later.If
mode = MOVE_MODE_RELATIVE,pos[0]andpos[1]are relative:pos[0]to the start pose,pos[1]topos[0].If one angle is provided, it is the total rotation along the arc. If two angles are provided,
angle1is the constant-velocity angle andangle2is the accel/decel angle; total rotation isangle1 + 2 × angle2.
Caution
When blending with blend_type = BLENDING_SPEED_TYPE_DUPLICATE and radius > 0, the preceding motion may terminate when the following motion finishes if its remaining time exceeds the following motion’s time.
MoveSplineJoint
Moves along a spline in joint space through the given waypoints to the final target. The given velocity/acceleration act as maximums; actual accel/decel depends on waypoint placement.
Request:
std_msgs/Float64MultiArray[] pos # up to 100 joint waypoints [6 each]
int8 pos_cnt # number of targets
float64[6] vel # joint velocity limits [deg/s]
float64[6] acc # joint acceleration limits [deg/s^2]
float64 time #= 0.0 # time [s]
int8 mode #= 0 # MOVE_MODE_ABSOLUTE=0, MOVE_MODE_RELATIVE=1
int8 sync_type #= 0 # SYNC=0, ASYNC=1
Response:
bool success
Note
If
timeis specified, the motion is time-based;vel/accare ignored.If
mode = MOVE_MODE_RELATIVE, eachposinpos_listis defined relative to the previous joint pose. For example, withpos_list = [q1, q2, ..., q(n)]:q1is relative to the start pose,q(n)is relative toq(n-1).Online blending of previous/subsequent motions is not supported.
MoveSplineTask
Moves along a spline in task space through the given waypoints to the final target. The given velocity/acceleration act as maximums; if the constant-velocity option is selected, constant-speed segments are used where applicable.
Request:
std_msgs/Float64MultiArray[] pos # task-space waypoints
int8 pos_cnt # number of targets
float64[2] vel # [linear mm/s, angular deg/s]
float64[2] acc # [linear mm/s^2, angular deg/s^2]
float64 time #= 0.0 # time [s]
int8 ref # DR_BASE(0), DR_TOOL(1), DR_WORLD(2)
# <DR_WORLD is only available in M2.40 or later>
int8 mode #= 0 # MOVE_MODE_ABSOLUTE=0, MOVE_MODE_RELATIVE=1
int8 opt #= 0 # SPLINE_VELOCITY_OPTION_DEFAULT=0, SPLINE_VELOCITY_OPTION_CONST=1
int8 sync_type #= 0 # SYNC=0, ASYNC=1
Response:
bool success
Note
If
velis provided (e.g.,vel=[30, 0]), it specifies the linear velocity; the angular velocity is set proportionally to this linear velocity.If
accis provided (e.g.,acc=[60, 0]), it specifies the linear acceleration; the angular acceleration is set proportionally to this linear acceleration.If
timeis specified, the motion is executed time-based andvel/accare ignored.The
refargument valueMOVE_REFERENCE_WORLDis available in M2.40 or later.If
mode = MOVE_MODE_RELATIVE, each element ofpos_listis relative to the previous element.Online blending of previous/subsequent motions is not supported.
Caution
If opt = SPLINE_VELOCITY_OPTION_CONST (constant-velocity), constant velocity between waypoints may not be achievable.
In such cases, motion falls back to variable-velocity mode (SPLINE_VELOCITY_OPTION_DEFAULT).
MoveBlending
Executes a sequence of line/circle segments at (approximately) constant speed, blending each segment with the specified radius (posb).
Request:
std_msgs/Float64MultiArray[] segment # up to 50: pos1[6]:pos2[6]:type[1]:radius[1]
int8 pos_cnt # number of segments
float64[2] vel # [linear mm/s, angular deg/s]
float64[2] acc # [linear mm/s^2, angular deg/s^2]
float64 time #= 0.0 # time [s]
int8 ref # DR_BASE(0), DR_TOOL(1), DR_WORLD(2)
# <DR_WORLD is only available in M2.40 or later>
int8 mode #= 0 # MOVE_MODE_ABSOLUTE=0, MOVE_MODE_RELATIVE=1
int8 sync_type #= 0 # SYNC=0, ASYNC=1
Response:
bool success
Note
If
velis provided (e.g.,vel=[30, 0]), it specifies the linear velocity; the angular velocity is set proportionally to this linear velocity.If
accis provided (e.g.,acc=[60, 0]), it specifies the linear acceleration; the angular acceleration is set proportionally to this linear acceleration.If
timeis specified, the motion is executed time-based andvel/accare ignored.The
refargument valueMOVE_REFERENCE_WORLDis available in M2.40 or later.If
mode = MOVE_MODE_RELATIVE, eachposinposb_listis relative to the previous position.
Caution
Error if the blending radius in
posbis 0.Error for duplicate Line inputs when contiguous Line–Line segments have the same direction.
Error if the blending condition would cause a rapid direction change (to prevent sudden acceleration).
Online blending of previous/subsequent motions is not supported.
MoveSpiral
Executes a spiral trajectory on the plane perpendicular to the specified axis (task_axis) with axial translation.
Request:
float64 revolution # total number of turns
float64 max_radius # final spiral radius [mm]
float64 max_length # axial travel distance [mm] (negative = negative axis direction)
float64[2] vel # [linear mm/s, angular deg/s]
float64[2] acc # [linear mm/s^2, angular deg/s^2]
float64 time #= 0.0 # total execution time [s]
int8 task_axis # TASK_AXIS_X=0, TASK_AXIS_Y=1, TASK_AXIS_Z=2
int8 ref #= 1 # DR_BASE(0), DR_TOOL(1), DR_WORLD(2)
# <DR_WORLD is only available in M2.40 or later>
int8 sync_type #= 0 # SYNC=0, ASYNC=1
Response:
bool success
Note
revolution: number of spiral turns.max_radius: final spiral radius.max_length: axial travel distance (negative means negative axis direction).If
timeis specified, the motion is time-based andvel/accare ignored.The
refargument valueMOVE_REFERENCE_WORLDis available in M2.40 or later.Online blending of previous/subsequent motions is not supported.
Caution
An error may be raised for safety if the computed rotational acceleration is too large.
Reduce vel, acc, or time.
MovePeriodic
Performs cyclic sine motion on each axis (translation/rotation) of the selected reference frame, as a relative motion from the current pose. Amplitudes and periods set the per-axis motion; accel/decel time and repetition count set timing.
Request:
float64[6] amp # amplitude per axis [mm]/[deg], motion between -amp and +amp
float64[6] periodic # period per axis [s]
float64 acc # accel/decel time [s]
int8 repeat # repetition count (reference axis drives total duration)
int8 ref #= 1 # DR_BASE(0), DR_TOOL(1), DR_WORLD(2)
# <DR_WORLD is only available in M2.40 or later>
int8 sync_type #= 0 # SYNC=0, ASYNC=1
Response:
bool success
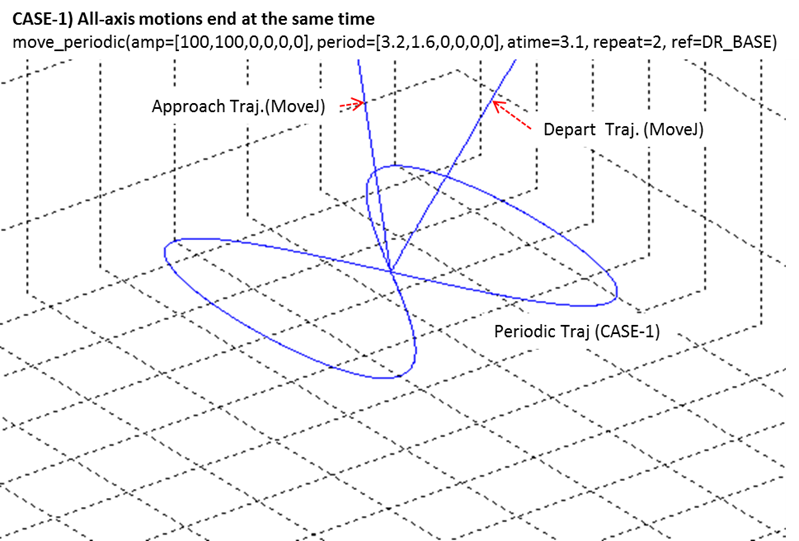
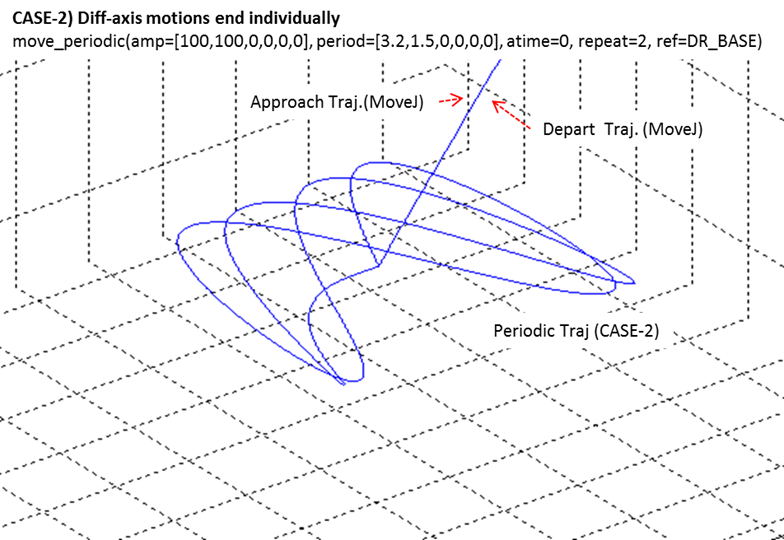
Note
amp:[x, y, z, rx, ry, rz]; axes without motion must be 0.periodic: per-axis periods (used as “period” in the velocity formula below).acc: accel/decel time. Effective value ismax(acc, max(periodic)/4). Error ifacc > total_motion_time / 2.repeat: set for the reference axis (largest period); other axes’ repetitions are auto-adjusted.On normal termination, some axes may finish earlier to return to the start pose; decel segments may deviate if axes do not finish simultaneously.
ref: repeated motion reference frame.MOVE_REFERENCE_WORLDis available in M2.40 or later.Max velocity guidance:
\[v_{\max} \approx \frac{\text{amp} \times 2\pi}{\text{period}}\]Example:
amp = 10 mm,period = 1 s→v_{\max} \approx 62.83 mm/s.Online blending of previous/subsequent motions is not supported.
Caution
If a maximum velocity error occurs, reduce amplitude or increase period (see formula).
MoveWait
Waits until the current motion finishes before proceeding to the next command.
Request:
(None)
Response:
bool success
MovePause
Decelerates and pauses the current motion. Ignored if no motion is in progress.
Request:
(None)
Response:
bool success
MoveResume
Resumes a paused motion. Ignored if no path motion is in progress.
Request:
(None)
Response:
bool success
MoveStop
Stops robot motion according to the specified stop mode.
Request:
int32 stop_mode # DR_QSTOP_STO(0) : Quick stop (Stop Cat. 1 without STO)
# DR_QSTOP(1) : Quick stop (Stop Cat. 2)
# DR_SSTO(2) : Soft Stop
# DR_HOLD(3) : HOLD stop
Response:
bool success
Jog
Performs jog control on a single axis.
Resulting jog speed = (250 mm/s) × speed [%]
Request:
int8 jog_axis # 0~5: JOINT1~6, 6~11: TASK X,Y,Z,rx,ry,rz
int8 move_reference # 0: MOVE_REFERENCE_BASE, 1: MOVE_REFERENCE_TOOL
float64 speed # jog speed [%] : + forward, 0 stop, - backward
Response:
bool success
JogMulti
Performs multi-axis jog control.
Multi-axis jog speed = (250 mm/s) / √3 × [unit vector] × speed [%]
Available in controller software 2.50 or later.
Request:
float64[6] jog_axis # unit vector in task space [Tx, Ty, Tz, Rx, Ry, Rz] : -1.0 ~ +1.0
int8 move_reference # 0: BASE, 1: TOOL, 2: WORLD
float64 speed # jog speed [%]
Response:
bool success
CheckMotion
Returns the status of the currently active motion.
Request:
(None)
Response:
int8 status # DR_STATE_IDLE(0): no motion
# DR_STATE_INIT(1): motion being calculated
# DR_STATE_BUSY(2): motion in operation
bool success
ChangeOperationSpeed
Adjusts operation velocity as a percentage (1–100) of the currently set speed.
For example, 50 reduces the speed to 50%.
Request:
int8 speed # 1~100 [%]
Response:
bool success
EnableAlterMotion
Available in M2.40 or later. Configures how alter_motion() inputs affect the current trajectory.
Base cycle is 100 ms; set to n × 100 ms via n.
Modes: Accumulation (absolute offset [dX,dY,dZ,dRX,dRY,dRZ]) and Increment (increment added to previous absolute offset).
Reference frame via ref.
Limits: limit_dpos (max accumulated) and limit_dpos_per (max per-cycle increment); applied values are clamped.
Request:
int32 n # cycle multiplier (cycle = n × 100 ms)
int8 mode # DR_DPOS(0): accumulation, DR_DVEL(1): increment
int8 ref # DR_BASE(0), DR_TOOL(1), DR_WORLD(2), user coord(101~200)
# <ref is only available in M2.40 or later>
float64[2] limit_dpos # [position mm, orientation deg]
float64[2] limit_dpos_per # per-cycle limits [position mm, orientation deg]
Response:
bool success
AlterMotion
Available in M2.40 or later. Applies the altering amount to the motion trajectory when alter is enabled.
Input semantics are defined by EnableAlterMotion.
Request:
float64[6] pos # altering amount [dX,dY,dZ,dRX,dRY,dRZ]
Response:
bool success
Note
alter_motion()can be executed only in a user thread.Limits are controlled by
limit_dpos/limit_dpos_perset inEnableAlterMotion.Input orientation follows fixed XYZ notation.
Caution
alter_motion() can be executed only in a user thread.
DisableAlterMotion
Available in M2.40 or later. Deactivates alter motion.
Request:
(None)
Response:
bool success
SetSingularityHandling
Selects the response policy when potential path deviation due to kinematic singularity is detected.
Auto Avoidance (default) —
SINGULARITY_AVOIDANCE_AVOIDReduces instability via automatic avoidance; may reduce path-tracking accuracy.Path First —
SINGULARITY_AVOIDANCE_STOPPrioritizes path: decelerates, warns, then stops if instability is likely.Velocity Variable —
SINGULARITY_AVOIDANCE_VELImproves path tracking with reduced instability; TCP speed varies in singular regions.
Request:
int8 mode # DR_AVOID(0): Auto avoidance
# DR_TASK_STOP(1): Decel / Warn / Stop
# DR_VAR_VEL(2): Variable velocity
Response:
bool success
SetSingularHandlingForce
This service configures the singular handling policy for force control / compliance control.
Request:
int8 mode # DR_SINGULARITY_ERROR(0)
# DR_SINGULARITY_IGNORE(1)
Response:
bool success
MoveHome
Performs homing by moving in joint space to the mechanical or user-defined home position.
Request:
int8 target # DR_HOME_TARGET_MECHANIC(0): mechanical home (0,0,0,0,0,0)
# DR_HOME_TARGET_USER(1): user home
Response:
int8 res # 0=success, otherwise failure code
bool success