MoveIt2 Dynamic YAML Launch Option
Overview
This tutorial introduces an advanced usage of the MoveIt 2 launch system that supports both dynamic and static controller YAML configurations.
This mechanism is especially useful when:
Simulating or controlling robots with custom or non-standard DOF (Degrees of Freedom)
Deploying to different robot variants without manually maintaining multiple static configuration files
Note
MoveIt 2 integration requires the following minimum Doosan Controller firmware versions:
Firmware 2.x: Version 2.12 or higher
Firmware 3.x: Version 3.4 or higher
Dynamic vs Static
Dynamic YAML Generation
Automatically generates controller.yaml at runtime based on the robot model’s active and passive joints.Static YAML Usage
Loads predefined YAML files like dsr_controller2.yaml or dsr_controller2_<model>.yaml from the dsr_controller2/config/ folder.
For example, the P3020 model (5-DOF) typically requires a modified static configuration file. The default dsr_controller2.yaml provided in the package is written for a 6-DOF robot. If you use the P3020 with a static YAML approach, you would need to manually edit a copy of this file so that it matches the 5-DOF configuration.
However, with the dynamic YAML generation feature, you can keep the original dsr_controller2.yaml unchanged. At launch, the system automatically parses the URDF, identifies the robot’s actual number of actuated joints, and generates a temporary YAML file tailored to the 5-DOF P3020 model. This eliminates manual edits while ensuring MoveIt 2 uses the correct controller configuration.
Command
ros2 launch dsr_bringup2 dsr_bringup2_moveit.launch.py [arguments]
Arguments
mode: Operation mode (realorvirtual)model: Robot model name (e.g.,m1013,a0509,p3020)host: IP address of the robot controllerdynamic_yaml: Set totrueto auto-generate controller.yaml, orfalseto use static YAML files
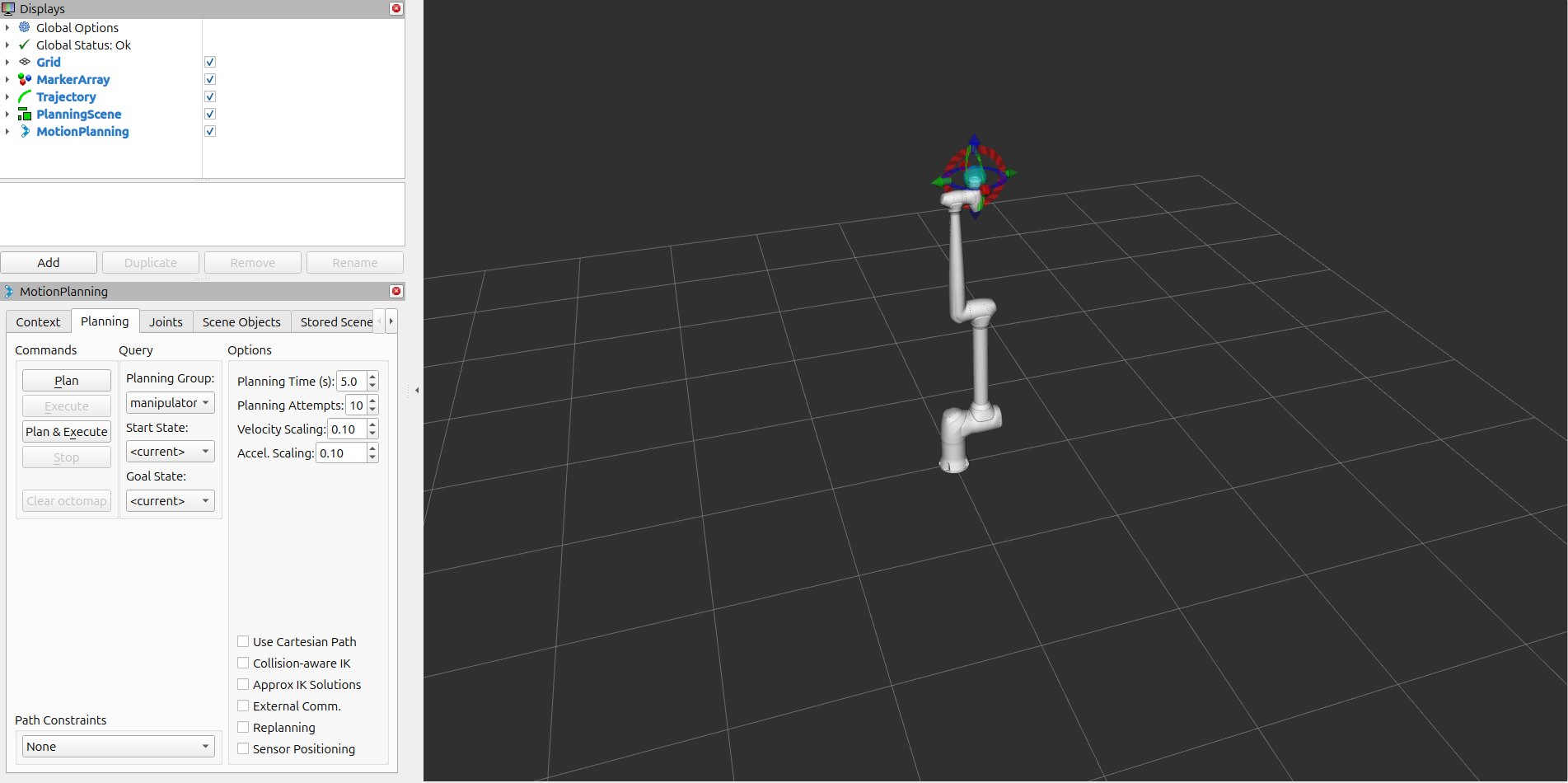
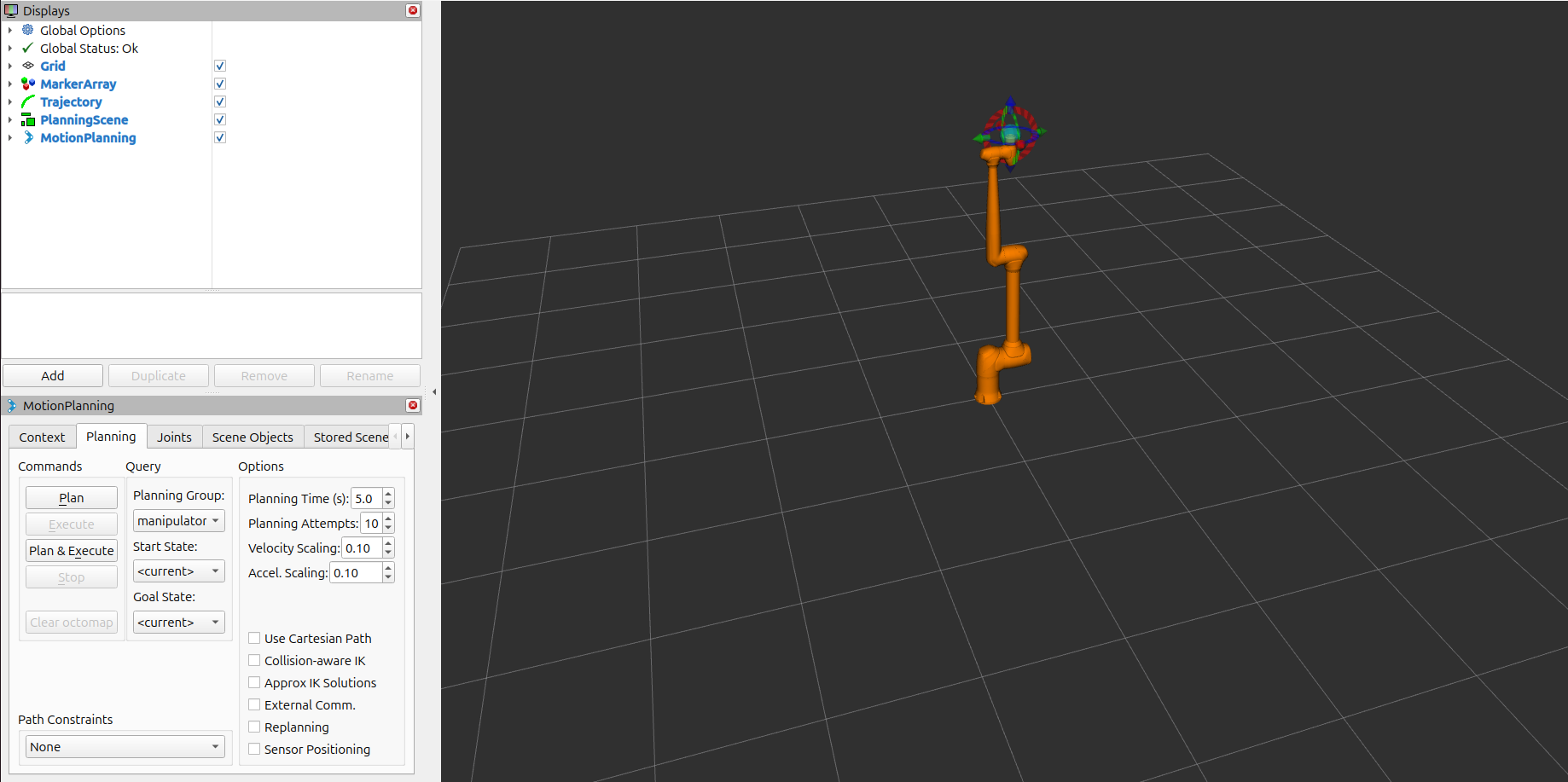
Setup and Launch
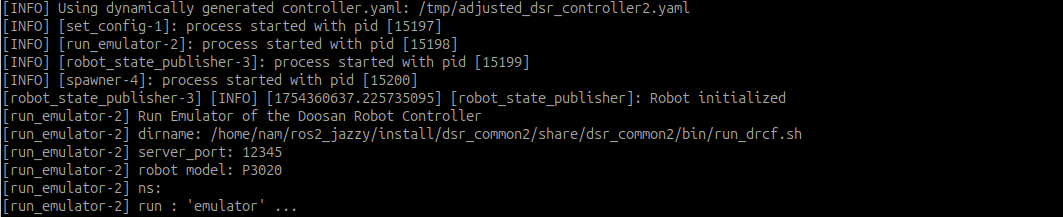
Dynamic Controller YAML Generation
ros2 launch dsr_bringup2 dsr_bringup2_moveit.launch.py mode:=virtual model:=p3020 host:=127.0.0.1 dynamic_yaml:=true
This will:
Parse the robot’s URDF to extract active and passive joints
Dynamically create a temporary YAML configuration with only the robot’s actuated joints
Apply this configuration to the controller manager without requiring manual file edits
Static Controller YAML (Model-Specific)
ros2 launch dsr_bringup2 dsr_bringup2_moveit.launch.py mode:=virtual model:=p3020 dynamic_yaml:=false
This will:
Search for a file named dsr_controller2_p3020.yaml in the dsr_controller2/config/ folder
If not found, fall back to the default dsr_controller2.yaml file

URDF / Xacro Requirements for Dynamic YAML
To ensure the dynamic generator functions correctly, your robot model’s URDF (typically converted from .xacro) must:
Clearly define which joints are actuated vs passive (e.g., using <joint type=”fixed”> or a consistent naming convention)
Include all joint names in a consistent order
Use valid joint types (revolute, prismatic, etc.) that are compatible with ros2_control
Example snippet in .xacro:
<joint name="joint_4" type="fixed">
<origin xyz="0 -0.89 -0.1731" rpy="1.5708 0 0"/>
<parent link="link_3"/>
<child link="link_4"/>
</joint>
This setup allows you to focus on the robot’s mechanical design while letting the system automatically adjust its control configuration for MoveIt 2 planning and execution.
For more detailed setup instructions, including recommended changes to URDF, Xacro macros, ros2_control plugin definitions, and associated YAML files
(e.g., initial_positions.yaml, ros2_controllers.yaml, joint_limits.yaml),
please refer to the complete guide: P3020 MoveIt 2 & ros2_control Integration Guide